La filosofia del mistero
rieditato nell'agosto 2025
Durante il periodo della laurea, ragionavo sul modo in cui far costruire ai robot una mappa dell'ambiente, partendo per esempio da immagini tridimensionali (che contengono una informazione sulla profondità) che si possono ricostruire da una semplice coppia di foto binoculari.
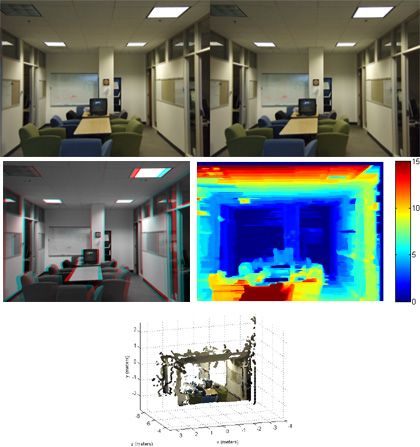
Coppia di immagini stereo, una immagine displacement, e la relativa immagine di profondità. In basso una la ricostruzione 3d della parte vista, dalla quale si possono percepire le parti nascoste
Ogni vista parziale permette di ricostruire una parte “istantanea” del modello dell'ambiente, che poi va aggiunta e contestualizzata in una mappa più ampia, che in qualche maniera definisce il “ricordo” del robot.