Dalle discussioni con gli eccellenti amici, con il gruppo di Exit, e dalla lettura di Maria Montessori, emerge la necessità di confrontarsi coscientemente e radicalmente con il sistema tecnico.
A tal proposito, cito un testo interessante, tratto dal libro Educazione e Pace (pagg. 10-11):
Manca nella società odierna la preparazione adeguata dell'uomo allo stato presente della vita civile, l'«organizzazione morale» delle masse.
Nell'umanità gli uomini sono educati a considerare se stessi come individui isolati, aventi i loro interessi immediati da soddisfare, in concorrenza con altri individui. Sarebbe necessaria una «organizzazione» poderosa per comprendere ed organizzare gli avvenimenti sociali, per proporsi e perseguire fini collettivi, e così ordinare il progresso della civiltà.
Un progetto che ho realizzato l'anno scorso all'Opificio Golinelli di Bologna... queste sono le slide della presentazione finale. Veramente una bella soddisfazione.
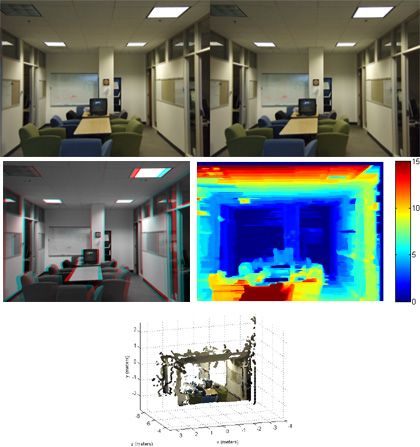
Durante il periodo della laurea, ragionavo sul modo in cui far costruire ai robot una mappa dell'ambiente, partendo per esempio da immagini tridimensionali (che contengono una informazione sulla profondità) che si possono ricostruire da una semplice coppia di foto binoculari.
Coppia di immagini stereo, una immagine displacement, e la relativa immagine di profondità. In basso una la ricostruzione 3d della parte vista, dalla quale si possono percepire le parti nascoste
Ogni vista parziale permette di ricostruire una parte “istantanea” del modello dell'ambiente, che poi va aggiunta e contestualizzata in una mappa più ampia, che in qualche maniera definisce il “ricordo” del robot.